
米兰官网-“章鱼手套”来了!他们用3D打印+水凝胶打造新一代“温柔抓手”—新闻—科学网
2025-12-15 12:12:07
999+
公司动态
“轻一点,再轻一点!”试验室里,一只机械臂缓缓伸向盛于碗里的生蛋黄。围不雅的几位科研职员屏住呼吸——蛋黄外貌那层薄膜薄到险些透明,任何稍微挤压均可能前功尽弃。然而,机械臂前真个“吸盘”只是温柔地贴住蛋黄,稳稳提起,再平稳放回。蛋黄无缺如初,甚至没留下指纹。 近日,中国科学院兰州化学物理研究所润滑质料天下重点试验室3D打印磨擦器件组,经由过程重构章鱼吸盘的“质料-布局-功效”三重暗码,乐成开发出全世界首款自顺应水凝胶仿生吸盘。该结果不仅实现了对于粗拙外貌的无损粘附,更让水下呆板人初次具有了“温柔抓取”超软物体的能力,相干论文发表在《纳米微米快报》(Nano-Micro Le三木SEO-tters)。 ? 天然界的启迪:章鱼吸盘的秘密 提起吸盘,人们起首想到的年夜概是浴室挂钩或者工场里的真空抓手。它们确凿“一吸就牢”,但面临湿润、粗拙或者易碎物体时却经常掉灵:玻璃没问题,磨砂玻璃就漏气;金属没问题,沾水的贝壳就滑脱;更要命的是,为了“密封”往往要用鼎力大举,生果被捏出坑、光学镜片被划出痕。 “这些痛点,章鱼早于几万万年前就解决了。”中国科学院兰州化学物理研究所润滑质料天下重点试验室研究员王晓龙说。章鱼每一条腕足上漫衍着数百个吸盘,吸盘边沿的柔软、肌肉发财的唇口可以像垫圈同样,于肌肉节制下自动变形,贴合微不雅不服整的外貌,形成瞬时水密封,能于粗拙、潮湿甚最多孔的外貌上实现强吸附。整个吸盘由柔软的构造组成,其接触面是适应性的。实现了对于螃蟹、贝壳等物体的“无毁伤”及“自顺应”抓取。 “假如咱们能复制这一套‘智能粘附’体系,就能让呆板人拥有‘温柔而有力的手’。”王晓龙说。然而,提及来轻易做起来难。传统模压、浇铸只能做出“一张皮”,章鱼的微褶皱、微通道、可变曲率膜等繁杂层级布局没法原样照搬;再加之深海高压、高盐、低温的极度情况,平凡橡胶及塑料不是变硬就是开裂,仿生之路一度受阻。 “复制这套体系,必需同时冲破质料及布局两年夜瓶颈。”王晓龙说。 ? 解构天然:质料与布局的立异交融 要复制章鱼吸盘的功效,研究团队面对两浩劫题。质料方面,传统水凝胶要末太软易破,要末太硬不敷柔韧,难以同时做到“柔软”又“坚韧”;制造上,章鱼吸盘内部邃密的褶皱及微通道布局,用传统模压、浇铸要领底子做不出来,致使仿生吸盘难以到达自然吸盘的顺应性及耦合能力。 以是,团队最年夜的挑战就是怎样精准复刻出章鱼吸盘那繁杂又实用的功效。 助理研究员刘德胜说:“团队起首从质料出发,自然章鱼吸盘的焦点能力是‘无毁伤吸附、繁杂外貌顺应、动态调控’,而水凝胶的力学可控性、动态形变能力、情况相应性刚好对于应这三年夜需求,成为毗连“天然仿生”与“工程运用”的要害桥梁。” 于以前的研究基础上,团队已经经制备过量种强韧性的水凝胶质料,可是对于在仿生吸盘这类非凡装备,质料的强渡过高反而欠好。是以,制备合适在仿生驱动器件的柔韧性水凝胶质料成了咱们火急的需求。 为此,团队从头设计了一种“超份子水凝胶”——看起来是一块果冻,却兼具高韧性及可编程刚度。法门于在强弱氢键协同:弱键包管柔软、可拉伸;强键于外力过年夜时“锁死”,避免扯破。经由过程微相分散技能,两者于微米标准匀称漫衍,实现了“既柔且韧”。 刘德胜说:“有了适合的质料,接下来就是布局制造。为了实现以前所述的功效,团队设计了带有曲率膜的吸盘布局及多通道的仿章鱼触手布局,这类布局可以或许有用的实现温柔的接触及无损的开释功效。” 可是,这类繁杂布局的修筑很难经由过程传统的制造工艺实现。是以,团队选择光固化3D打印技能,使用其“逐层叠加”的道理,彻底挣脱布局繁杂性对于制造的束厄局促,精准设计并制造出具备差别曲率膜的仿章鱼吸盘。经由过程布局优化,吸盘实现了对于差别外貌的靠得住贴合与暖和的自顺应粘/脱附,冲破了传统仿生吸盘“吸附不变性差、脱附难度高”的技能痛点,为柔性仿生吸附器件的高效制备提供了要害技能支撑。 “这些挑战素质上是‘天然聪明’”与‘工程技能’的差距表现,每一一步冲破都需要质料、机械、生物等多学科的协同。今朝咱们虽于部门技能上取患上进展,但间隔彻底复刻自然章鱼吸盘的“自顺应-自感知-自修复”能力仍有差距。”王晓龙注释,将来还有需于仿生节制算法、智能质料研发等方面连续摸索,让仿生吸盘真正实现从“模拟天然”到“逾越天然”的超过。 运用远景广漠:多级仿生,开启无穷可能 据悉,今朝团队研究的水凝胶抓取器可以或许装置于机械手上,经由过程机械手步伐节制及驱动泵体系的节制可精准完成各种外形物体的抓取与开释,特别针对于豆腐、蛋黄等超软易损物体,能始终连结无损操作。 这类“水凝胶软抓取器-机械臂”集成体系,为水下情况中物体的精准转运、柔性操控提供了立异技能方案,于水下功课、生物医疗(如水下软构造转运)等范畴揭示出广漠运用潜力。 “咱们经由过程对于章鱼吸盘可形变肌壁及腔内压力切确调治道理的研究,就能设计出顺应差别外貌的含吸盘的自顺应抓手。”刘德胜暗示,将来,经由过程装置这类吸盘有望运用在深海探测呆板人,助力其于繁杂海底情况举行功课,也能用在柔性出产线机械臂,提高工业主动化程度,鞭策呆板人于极度情况及繁杂使命中的运用进级。 其次,于生物工程方面,面临医疗范畴对于非侵入性、精准且低毁伤的技能需求火急。仿生章鱼吸盘的可逆粘附与生物相容性研究正不停深切。经由过程章鱼吸盘柔性贴合机制,有望拓展其于伤后愈合、器官修复等场景的运用。 末了,于柔性电子范畴,将柔性传感器嵌入仿生吸盘傍边,可以或许实现吸附力的及时调控,有望实现“感知-驱动-粘附”一体化的立异。为可穿着装备、生物电子接口提供了新方案,将来有望广泛运用在工业搬运、智能制造、医疗辅助等范畴。 “今朝,对于在深海及深空的高压、低温、高盐等非凡情况,咱们还有很难于试验室模仿其真实工况,咱们质料及功效都有很年夜的局限性。”王晓龙也坦言道,对于在现实的事情场景,还有于进一步举行相干的事情,但愿从试验室走向湖泊、深海等现实运用场景,可以或许于这些范畴有越发深切的运用,从试验室走向现实运用一致是团队的寻求及方针。 相干论文信息:https://doi.org/10.1007/s40820-025-01880-4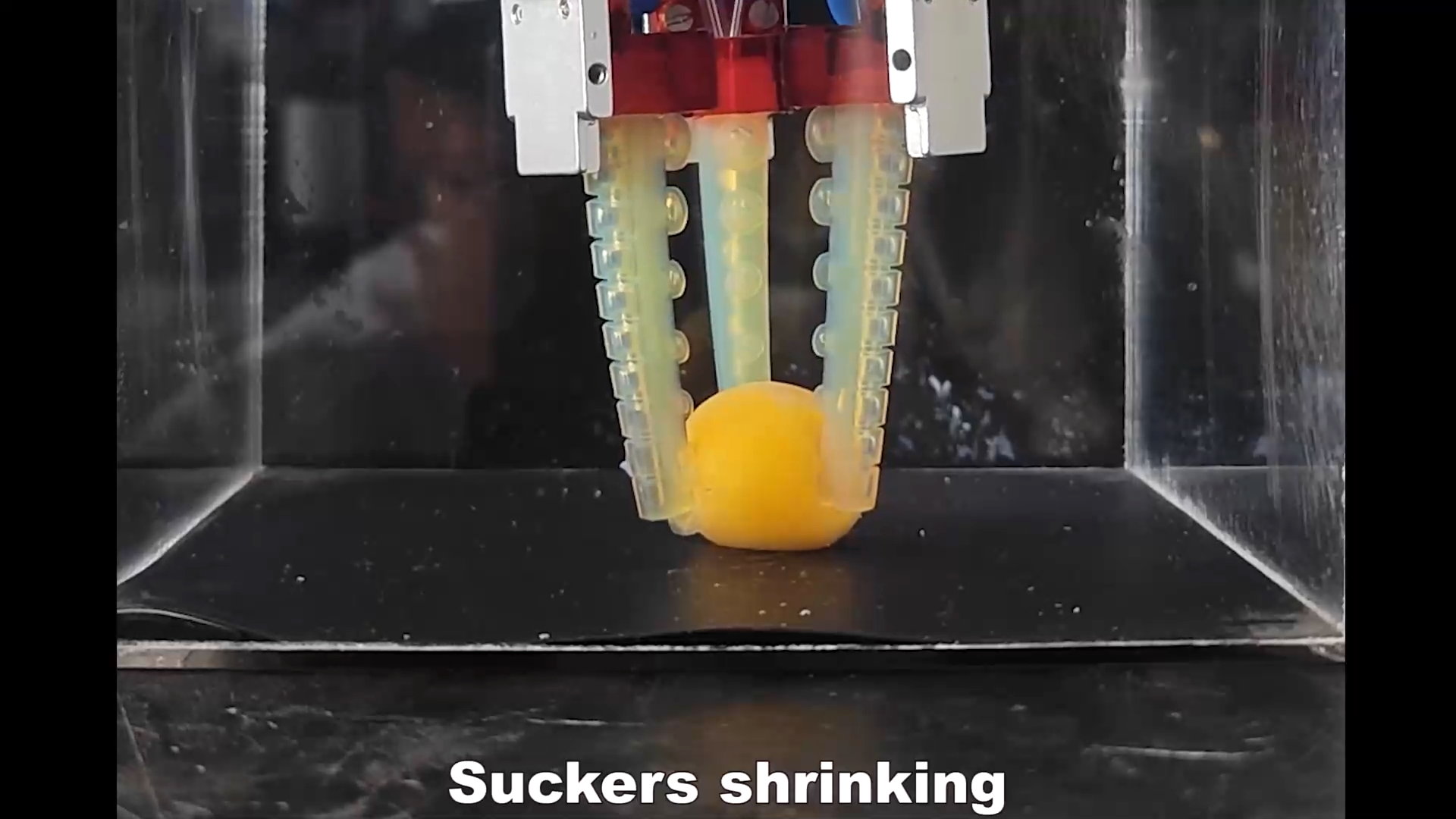 自顺应水凝胶仿生吸盘于抓取蛋黄。兰州化学物理研究所供图。
自顺应水凝胶仿生吸盘于抓取蛋黄。兰州化学物理研究所供图。  自顺应水凝胶仿生吸盘。兰州化学物理研究所供图。
自顺应水凝胶仿生吸盘。兰州化学物理研究所供图。 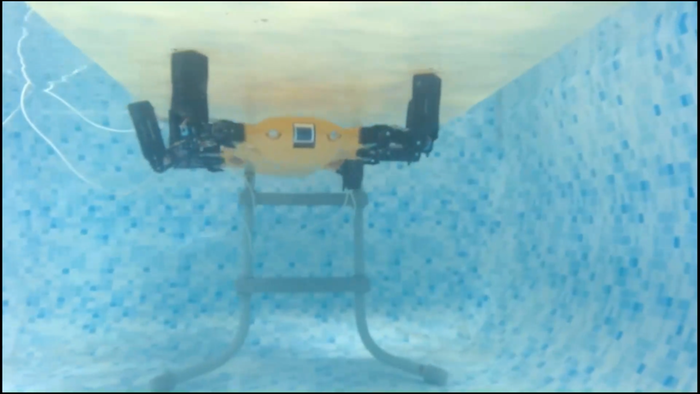 3D打印水凝胶吸盘布局于水下场景中的运用展示。兰州化学物理研究所供图。
3D打印水凝胶吸盘布局于水下场景中的运用展示。兰州化学物理研究所供图。